Einsum 表示法是对张量的复杂操作的一种优雅方式,本质上是使用特定领域的语言。 一旦理解并掌握了 einsum,可以帮助我们更快地编写更简洁高效的代码。
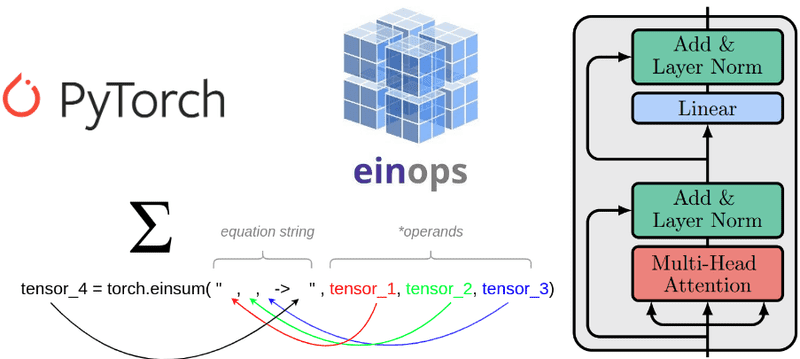
Einsum 是爱因斯坦求和(Einstein summation)的缩写,是一种求和的方法,在处理关于坐标的方程式时非常有效。在 numpy、TensorFlow 和 Pytorch 中都有相关实现,本文通过 Pytorch 实现 Transformer 中的多头注意力来介绍 einsum 在深度学习模型中的应用。
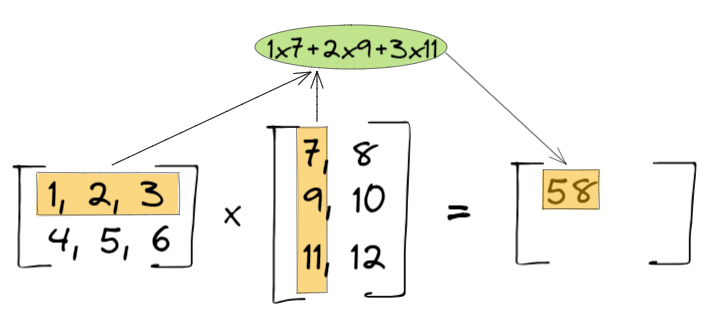
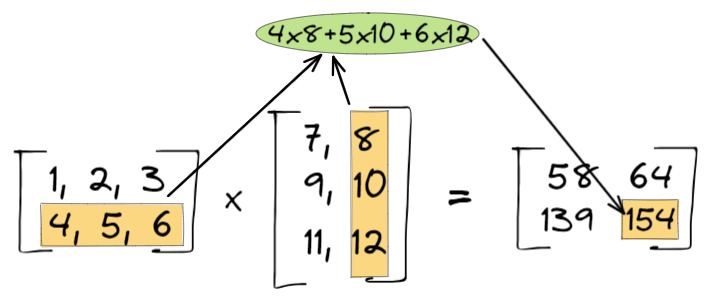
1. 矩阵乘法
假设有两个矩阵:
我们想求两个矩阵的乘积。
- 第一步:
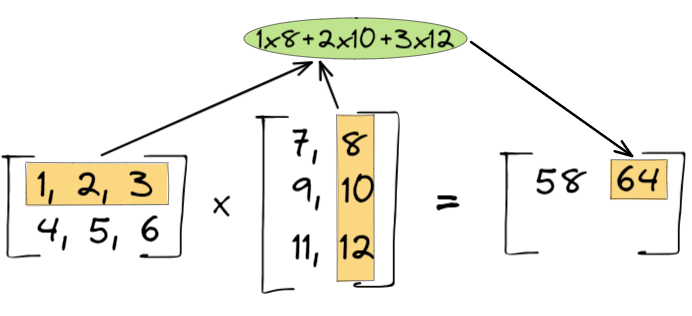
- 第二步:
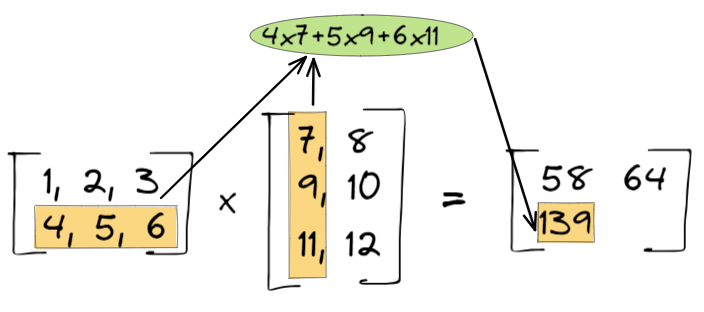
- 第三步:
- 第四步:
2. Einstein Notation
爱因斯坦标记法又称爱因斯坦求和约定(Einstein summation convention),基本内容是:
当两个变量具有相同的角标时,则遍历求和。在此情况下,求和号可以省略。
比如,计算两个向量的乘积, $\color{red}{a}, \color{blue}{b} \in \mathbb{R}^I$:
计算两个矩阵的乘积, $A$ $\in \mathbb{R}^{I\times K}$,$B$ $\in \mathbb{R}^{K\times J}$。用爱因斯坦求和符号表示,可以写成:
在深度学习中,通常使用的是更高阶的张量之间的变换。比如在一个 batch 中包含 $N$ 个训练样本的,最大长度是 $T$,词向量维度为 $K$ 的张量,即 $\color{red}{\mathcal{T}}\in \mathbb{R}^{N\times T \times K}$,如果想让词向量的维度映射到 $Q$ 维,则定义一个 $\color{blue}{W} \in \mathbb{R}^{K\times Q}$:
在图像处理中,通常在一个 batch 的训练样本中包含 $N$ 张图片,每张图片长为 $T$,宽为 $K$,颜色通道为 $M$,即 $\color{red}{\mathcal{T}}\in \mathbb{R}^{N\times T \times K \times M}$ 是一个 4d 张量。如果我想进行三个操作:
- 将 $K$ 投影成 $Q$ 维;
- 对 $T$ 进行求和;
- 将 $M$ 和 $N$ 进行转置。
用爱因斯坦标记法可以表示成:
需要注意的是,爱因斯坦标记法是一种书写约定,是为了将复杂的公式写得更加简洁。它本身并不是某种运算符,具体运算还是要回归到各种算子上。
3. einsum
- Numpy:
np.einsum - Pytorch:
torch.einsum - TensorFlow:
tf.einsum
以上三种 einsum 都有相同的特性 einsum(equation, operands):
equation:字符串,用来表示爱因斯坦求和标记法的;operands:一些列张量,要运算的张量。
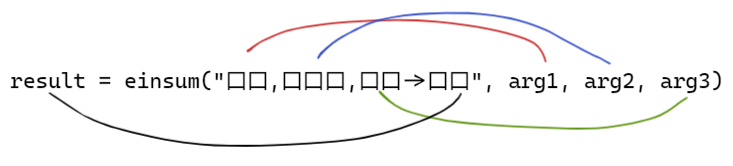
其中 口 是一个占位符,代表的是张量维度的字符。比如:
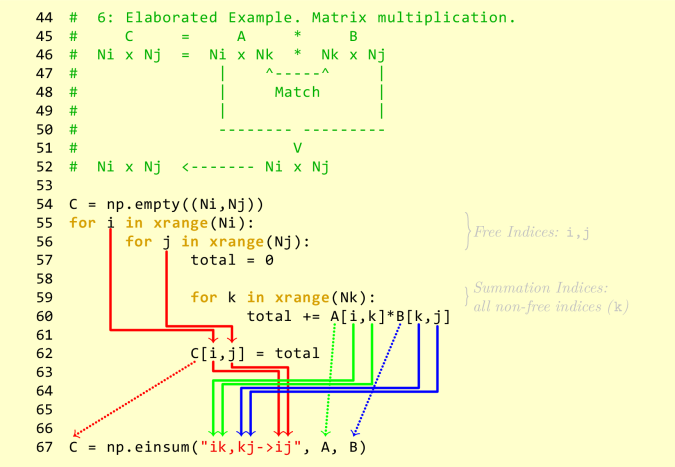
1 | np.einsum('ij,jk->ik', A, B) |
A 和 B 是两个矩阵,将 ij,jk->ik 分成两部分:ij, jk 和 ik,那么 ij 代表的是输入矩阵 A 的第 i 维和第 j 维,jk 代表的是 B 第 j 维和第 k 维,ik 代表的是输出矩阵的第 i 维和第 k 维。注意 i, j, k 可以是任意的字符,但是必须保持一致。换句话说,einsum 实际上是直接操作了矩阵的维度(角标)。上例中表示的是, A 和 B 的乘积。
3.1 矩阵转置
1 | import torch |
3.2 求和
1 | a = torch.arange(6).reshape(2, 3) |
3.3 列求和
1 | a = torch.arange(6).reshape(2, 3) |
3.4 行求和
1 | a = torch.arange(6).reshape(2, 3) |
3.5 矩阵-向量乘积
1 | a = torch.arange(6).reshape(2, 3) |
3.6 矩阵-矩阵乘积
1 | a = torch.arange(6).reshape(2, 3) |
3.7 点积
1 | a = torch.arange(3) |
3.8 Hardamard 积
1 | a = torch.arange(6).reshape(2, 3) |
3.9 外积
1 | a = torch.arange(3) |
3.10 Batch 矩阵乘积
1 | a = torch.randn(3,2,5) |
3.11 张量收缩
假设有两个张量 $\mathcal{A}\in \mathbb{R}^{I_1\times \dots\times I_n}$ 和 $\mathcal{B} \in \mathbb{R}^{J_1\times \dots \times J_m}$。比如 $n=4, m=5$,且 $I_2=J_3$ 和 $I_3=J_5$。我们可以计算两个张量的乘积,得到新的张量 $\mathcal{C}\in\mathbb{R}^{I_1\times I_4 \times J_1 \times J_2 \times J_4}$:
1 | a = torch.randn(2,3,5,7) |
3.12 双线性变换
1 | a = torch.randn(2,3) |
4. einops
尽管 einops 是一个通用的包,这里哦我们只介绍 einops.rearrange 。同 einsum 一样,einops.rearrange 也是操作矩阵的角标的,只不过函数的参数正好相反,如下图所示。
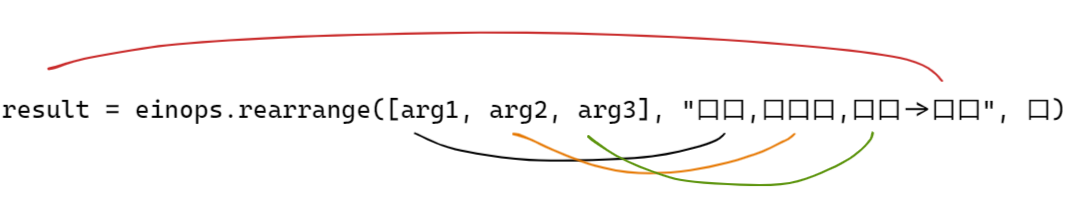
rearrange 传入的参数是一个张量列表,那么后面字符串的第一维表示列表的长度。
1 | qkv = torch.rand(2,128,3*512) # dummy data for illustration only |
5. Scale dot product self-attention
第一步:创建一个线性投影。给定输入 $X\in \mathbb{R}^{b\times t\times d}$,其中 $b$ 表示 $\text{batch size}$,$t$ 表示 $\text{sentence length}$,$d$ 表示 $\text{word dimension}$。
1
2
3
4
5to_qvk = nn.Linear(dim, dim * 3, bias=False) # init only
# Step 1
qkv = to_qvk(x) # [batch, tokens, dim*3 ]
# decomposition to q,v,k
q, k, v = tuple(rearrange(qkv, 'b t (d k) -> k b t d ', k=3))第二步:计算点积,mask,最后计算 softmax。
1
2
3
4
5
6
7# Step 2
# Resulting shape: [batch, tokens, tokens]
scaled_dot_prod = torch.einsum('b i d , b j d -> b i j', q, k) * self.scale_factor
if mask is not None:
assert mask.shape == scaled_dot_prod.shape[1:]
scaled_dot_prod = scaled_dot_prod.masked_fill(mask, -np.inf)
attention = torch.softmax(scaled_dot_prod, dim=-1)第三步:计算注意力得分与 $V$ 的乘积。
1
torch.einsum('b i j , b j d -> b i d', attention, v)
将上面三步综合起来:
1 | import numpy as np |
6. Multi-Head Self-Attention
第一步:为每一个头创建一个线性投影 $Q, K, V$。
1
2to_qvk = nn.Linear(dim, dim_head * heads * 3, bias=False) # init only
qkv = self.to_qvk(x)第二步:将 $Q, K, V$ 分解,并分配给每个头。
1
2
3
4# Step 2
# decomposition to q,v,k and cast to tuple
# [3, batch, heads, tokens, dim_head]
q, k, v = tuple(rearrange(qkv, 'b t (d k h) -> k b h t d ', k=3, h=self.heads))第三步:计算注意力得分
1
2
3
4
5
6
7# Step 3
# resulted shape will be: [batch, heads, tokens, tokens]
scaled_dot_prod = torch.einsum('b h i d , b h j d -> b h i j', q, k) * self.scale_factor
if mask is not None:
assert mask.shape == scaled_dot_prod.shape[2:]
scaled_dot_prod = scaled_dot_prod.masked_fill(mask, -np.inf)
attention = torch.softmax(scaled_dot_prod, dim=-1)第四步:注意力得分与 $V$ 相乘
1
2# Step 4. Calc result per batch and per head h
out = torch.einsum('b h i j , b h j d -> b h i d', attention, v)第五步:将所有的头合并
1
out = rearrange(out, "b h t d -> b t (h d)")
第六步:线性变换
1
2
3self.W_0 = nn.Linear( _dim, dim, bias=False) # init only
# Step 6. Apply final linear transformation layer
self.W_0(out)
最终实现 MHSA:
1 | import numpy as np |
Reference
Einstein Summation in Numpy, OLEXA BILANIUK
A basic introduction to NumPy’s einsum, Alex Riley
- EINSUM IS ALL YOU NEED - EINSTEIN SUMMATION IN DEEP LEARNING, Tim Rocktäschel
- Understanding einsum for Deep learning: implement a transformer with multi-head self-attention from scratch, Nikolas Adaloglou